













 |
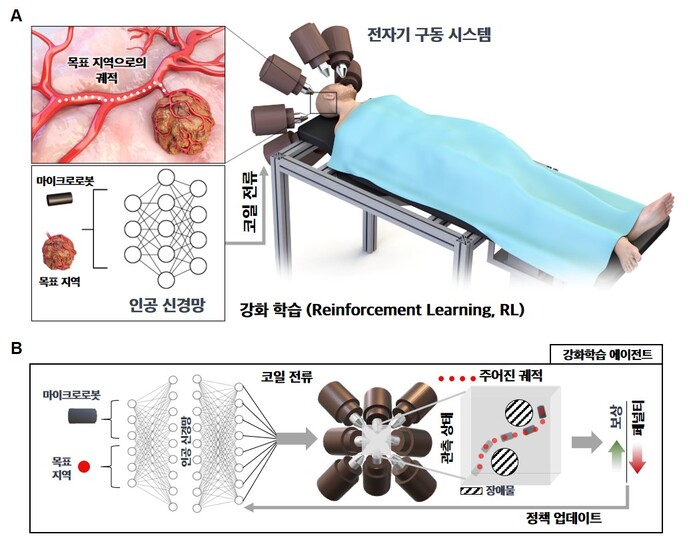
| ▲ 인공 신경망을 이용한 전자기 구동 시스템의 자성 마이크로로봇 제어 방법을 표현한 핵심 개념 도표 (상), 관심 영역 내에서 마이크로로봇을 목표 지역으로 제어하기 위해 전자기 구동 시스템의 코일 전류 제어 방식에 대해 강화 학습 에이전트의 학습 (하) (사진=한국연구재단 제공) |
[mdtoday=이재혁 기자] 복잡한 계산 없이도 의료용 마이크로로봇을 인체 내에서 정밀하게 제어할 수 있는 새로운 구동 방법이 개발됐다.
한국연구재단은 대구경북과학기술원 최홍수 교수 연구팀이 강화학습(Reinforcement Learning)을 기반으로 한 인공신경망(Artificial Neural Network)을 활용해 자성 마이크로로봇의 3차원 위치를 자동으로 정밀 제어할 수 있는 방법을 개발했다고 12일 밝혔다.
강화학습이란 인공지능 모델의 행동을 학습하는 방식으로, 행동에 따른 주변 환경과의 상호작용에서 오는 보상을 최대화하는 방법을 통해 최적의 전략을 찾는 방법을 말한다.
외부 전자기 구동시스템(Electromagnetic Actuation Systems)*에서 생성되는 자기장과 자기력에 의해 무선 제어되는 자성 마이크로로봇은 이 특성을 이용, 인체 내 치료 인자를 전달하는 정밀 표적 치료에 활용될 수 있다.
그러나 혈관, 종양 등과 같은 인체 내 동적인 환경에서 마이크로로봇을 목표 위치까지 구동시키기 위해서는 복잡한 모델링 또는 수학적 계산이 필요한데, 활용 목적에 따라 다양한 형상을 갖는 마이크로로봇 특성상 개별 로봇에 맞는 적절한 구동 체계를 각각 수립해야 해 많은 시간과 노력이 소모된다는 한계가 있었다.
이에 연구팀은 복잡한 수학적/물리적 모델링 없이도 다양한 형태의 마이크로로봇을 제어할 수 있는 범용적인 방법을 고안, 마이크로로봇의 3차원 정밀 위치 제어법을 스스로 터득할 수 있는 강화학습 기반의 인공신경망을 개발했다.
개발된 인공신경망은 전자기 구동시스템에 전류를 직접 인가하는 방식으로 마이크로로봇을 구동, 그 결과를 직접 평가함으로써 마이크로로봇의 3차원 위치 제어법을 스스로 학습했다.
인공신경망은 전자기 구동시스템에 전류를 직접 인가하며 마이크로로봇을 구동하고 구동 결과를 평가함으로써 마이크로로봇의 3차원 위치 제어법을 스스로 학습하였다. 복잡한 모델링 없이도 인공신경망에 학습 환경을 제공함으로써 다양한 마이크로로봇에 대한 보편적이고 최적의 구동법을 수립할 수 있다.
학습된 인공신경망을 활용한 결과, 마이크로로봇이 종래의 제어 방식을 사용한 경우보다 약 50% 빠른 속도로 목표 위치에 수렴했다. 또한, 기존의 제어 방식보다 약 40% 더 적은 위치 오차를 보였다.
인공신경망은 기존에 고려되지 않은 정적 또는 동적인 외란도 스스로 학습할 수 있다. 강화학습을 통해 인공신경망은 자기장/자기력의 불균일성을 학습하여, 넓은 영역에서 마이크로로봇의 종류와 구동 환경과 무관하게 우수한 제어 정밀도를 보여주었다. 또한, 인체의 맥박을 모사한 1.5 mm/s의 유동 내에서도 진행 방향과 무관하게 마이크로로봇을 원하는 경로를 따라 정밀하게 이동시킬 수 있었다.
또한 학습된 인공신경망을 경로 생성 알고리즘과 통합하여 마이크로로봇의 완전 자율 구동의 가능성을 실험적으로 증명했다.
최홍수 교수는 “이번 연구를 통해 강화학습 기반의 인공신경망을 활용한 구동 방법이 종래의 제어 방식보다 마이크로로봇을 더 빠르고 정밀하게 제어할 수 있다는 것을 확인할 수 있었다”며, “적은 시간과 자원으로 다양한 형태의 마이크로로봇과 전자기 구동시스템에 적용될 수 있는 범용적인 구동 체계가 될 것으로 기대된다”고 밝혔다.
과학기술정보통신부와 한국연구재단이 추진하는 국가과학난제도전융합연구개발사업의 지원으로 수행된 이번 연구 성과는 인공지능 분야 국제학술지 ‘네이처 머신 인텔리전스(Nature Machine Intelligence)’에 1월 11일 게재됐다.
메디컬투데이 이재혁 ([email protected])


[저작권자ⓒ 메디컬투데이. 무단전재-재배포 금지]